Research Overview
Approach
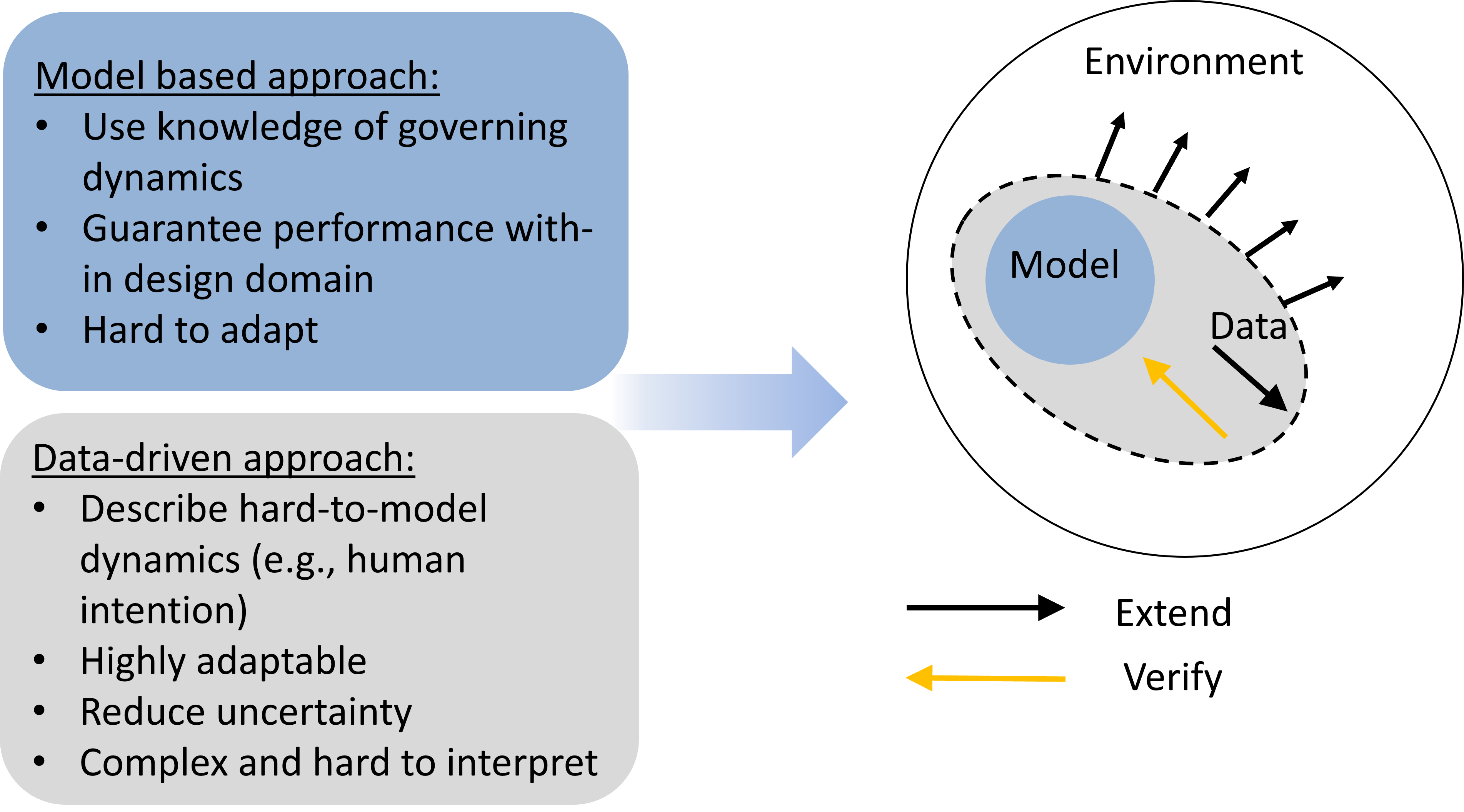 |
The research at SEAS Lab lies in the intersection of control theory and machine learning. |
Applications
 |
We applied our approach to deliver safe and efficient autonomous systems in real world when interacting with humans. |
Current Projects
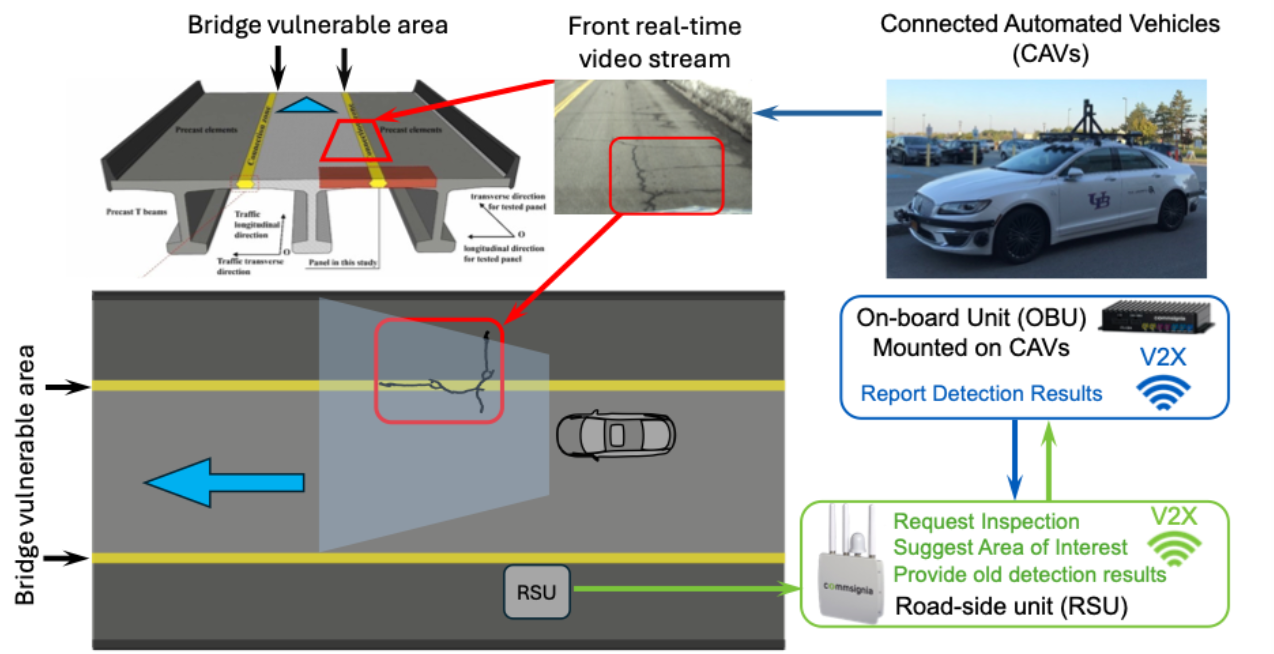
Continuous & Low-cost Inspection of Precast Concrete Bridges using Connected Automated Vehicles (CAVs)
Funded by USDOT UTC TRANS-IPIC, this project seek to leverage connected vehicles to achieve continuous inspection of the road infrastructure status of health.
 |
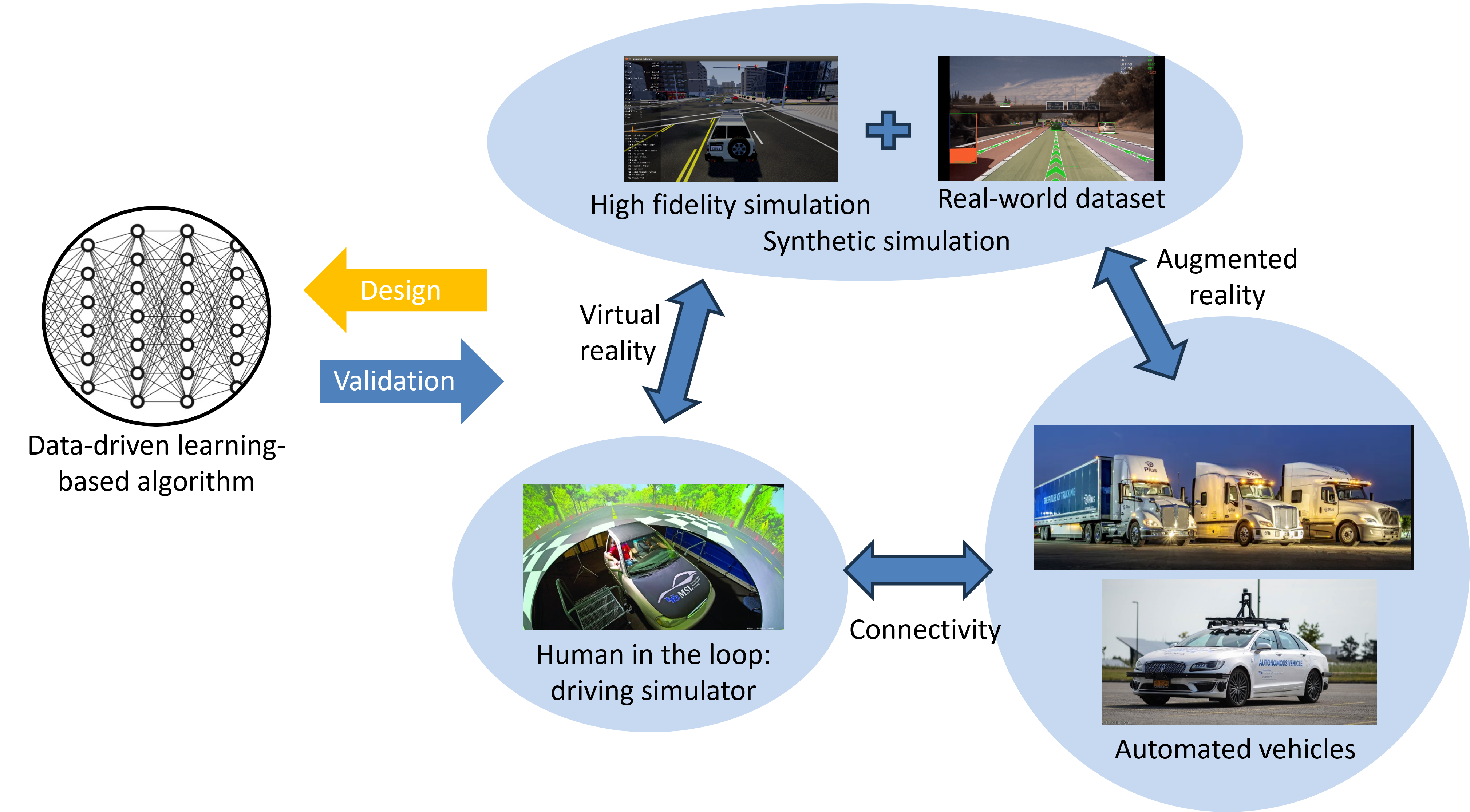
Multi-Agent Multi-Modality Simulation & Testing
With granted access to Mcity testing capabilities for connected automated vehicles, we team up with TRAVL Lab @UB to build human-in-the-loop testing environment that allows development and certification of connected automated vehicle in safe critical scenarios.
 |
Design and Certification for Safe, Efficient and Trustworthy Algorithms for Autonomous Systems
1. Game-theoretic modeling on human behavior that allows influence
2. Safe and efficient motion planning and control considering interactive human behavior
 |
J12. Y. Shi, H. Dong, C. R. He, Y. Chen and Z. Song. Mixed Vehicle Platoon Forming: A Multi-agent Reinforcement Learning Approach. IEEE Internet of Things Journal, in press, 2025. [PDF][DOI]
P12. C. R. He and N. Li. Eco-driving Accounting for Interactive Cut-in Vehicles. 2024 IEEE International Conference on Mobility, Operations, Services and Technologies (MOST), Denton, TX, USA, 2024, to appear. [PDF][DOI][arXiv]
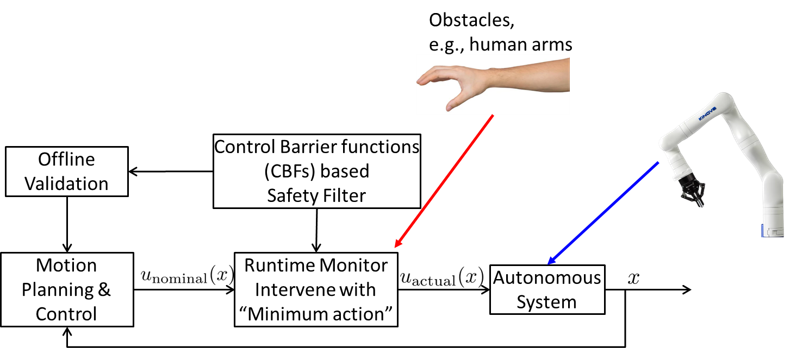
Build Seamless Human Robot Teaming
1. Task and motion planning (TAMP) based on Vision Language Action (VLA) model.
2. Safe and proactive motion control based on control barrier function (CBFs).
 |
Past Projects
Data-driven Energy-efficient Control for Connected and Automated Vehicles in Interactive Traffic Conditions
We introduced connected cruise control (CCC) strategies by which connected and automated vehicles (CAVs) plan their longitudinal motions by considering multiple vehicles ahead.
With data-driven approach, we are able to improve the efficiency of CAVs in dynamic traffic and robust to communication and actuation delays and varying communication topologies.
In collaboration with Navistar, we implement the design in class 8 trucks and tested on closed test track and on public highways.
Currently, we working on interactive planning approach that can unlock more energy saving potential by properly predict and influence other road vehicles.
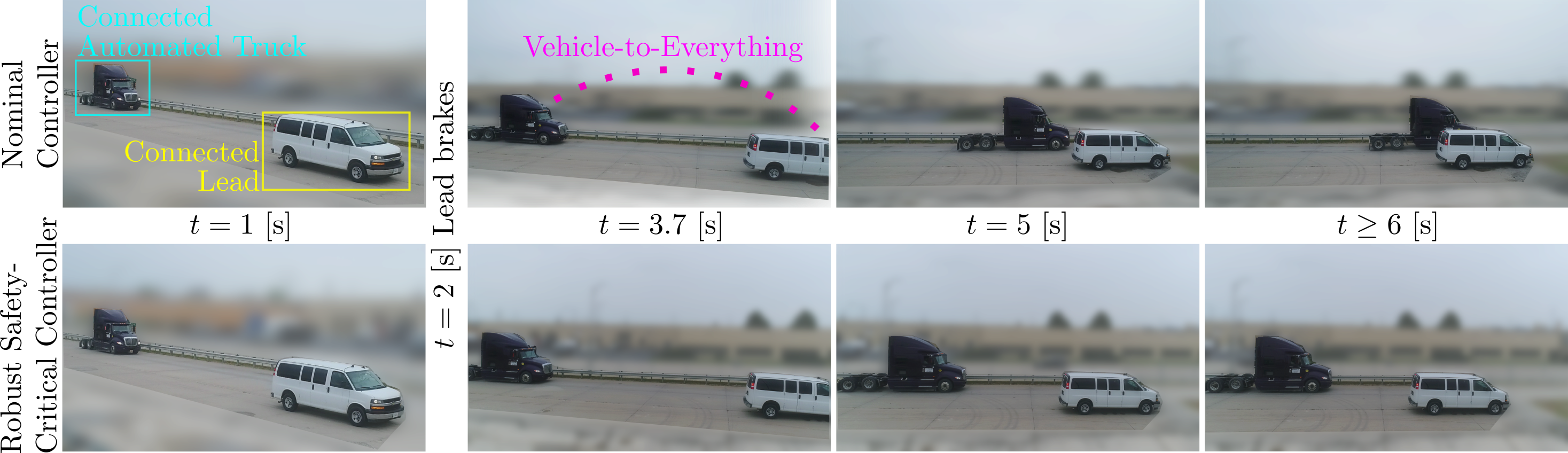
J11. A. Alan, C. R. He, T. G. Molnár, J. C. Mathew, A. H. Bell, and G. Orosz. Integrating safety with performance in connected automated truck control: experimental validation. IEEE Transactions on Intelligent Vehicles, published online, 2023. [DOI]
J10. M. Shen, R. A. Dollar, T. G. Molnár, C. R. He, A. Vahidi, and G. Orosz. Energy-efficient reactive and predictive connected cruise control. IEEE Transactions on Intelligent Vehicles, published online, 2023. [DOI]
J8. M. Shen, C. R. He, T. G. Molnár, A. H. Bell, and G. Orosz. Energy-efficient connected cruise control with lean penetration of connected vehicles. IEEE Transactions on Intelligent Transportation Systems, 24(4):4320-4332, 2023. [PDF] [DOI]
J5. C. R. He, J. I. Ge, and G. Orosz. Fuel Efficient Connected Cruise Control for Heavy-duty Trucks in Real Traffic. IEEE Transactions On Control Systems Technology, in press, 2019. [PDF] [DOI]
Safe Controller Verification and Synthesis
Based on control safety function theory, we proposed safety chart for controller safety verification (analogous to stability chart for stability verification) and safe controller synthesis with minimal intervention.
We utilize them to help production trucks achieves certifiable forward collision avoidance.
 |
 |
J9. A. Alan, A. J. Taylor, C. R. He, A. D. Ames, and G. Orosz. Control barrier functions and input-to-state safety with application to automated vehicles. IEEE Transactions on Control Systems Technology, 31(6):2744-2759, 2023. [PDF] [DOI]
J6. A. Alan, A. J. Taylor, C. R. He, G. Orosz, and A. D. Ames. Safe controller synthesis with tunable input-to-state safe control barrier functions. IEEE Control Systems Letters, 6:908-913, 2022. [PDF] [DOI]
P5. C. R. He and G. Orosz. Saving fuel using wireless vehicle-to-vehicle communication. Proceedings of the American Control Conference, 4946-4951, IEEE, 2017. [PDF] [DOI]
Enhanced Safety and Efficiency with Beyond-line-of-Sight Information
J4. J. I. Ge, S. S. Avedisov, C. R. He, W. B. Qin, M. Sadeghpour, and G. Orosz. Experimental validation of connected automated vehicle design among human-driven vehicles, Transportation Research Part C, 91:335-352, 2018. [PDF] [DOI]
J3. G. Orosz, J. I. Ge, C. R. He, S. S. Avedisov, W. B. Qin, and L. Zhang. Seeing beyond the line of sight - controlling connected automated vehicles. ASME Mechanical Engineering Magazine, 139(12):S8-S12, 2017. [PDF] [DOI]