
Hi, I am
Pavan Varma Pothuri
Full Name: Jagadeswara Pavan Kumar Varma Pothuri
I believe robotics is the art of turning code into motion, sensors into sight, and data into decisions. Armed with a Master’s in Robotics, I develop systems that navigate uncertainty with intelligence and purpose.
About Me
I’m a robotics engineer passionate about designing intelligent systems that solve real world problems. With a Master’s in Robotics from the University at Buffalo, I’ve built a strong foundation in autonomous systems, computer vision, and artificial intelligence, grounded in hands-on experimentation and real-world deployment.
My work in computer vision has involved developing algorithms that enable machines to perceive and interpret their surroundings, from object detection and tracking to semantic understanding of dynamic scenes. I believe vision is at the heart of intelligent behavior in robots.
I thrive at the intersection of software and hardware where code becomes motion and algorithms must adapt to dynamic, uncertain environments. My experience has shaped my ability to think both analytically and creatively, translating complex concepts into robust, reliable systems.
I’m driven by the opportunity to learn, to collaborate with purpose-driven teams, and to build technologies that make a tangible impact. To me, great engineering is about more than just precision. It is also about curiosity, persistence, and a deep understanding of how systems behave beyond the lab.
At my core, I enjoy solving hard problems, building systems that move and see, and continuously growing through each project, conversation, and challenge I take on.
My Skills
Specializing in robotics, artificial intelligence, computer vision, SLAM, and autonomous systems development
Programming Languages
- Python
- C++
- MATLAB
- CUDA
Computer Vision
- Object Detection & Tracking
- Semantic Segmentation
- Optical Flow
- Stereo Visual Odometry
- Structure from Motion
- 3D Reconstruction
- Camera Calibration
- Sensor Fusion
- Visual SLAM
- Vision Transformers
- Vision Language Models
Robotics and Autonomy
- SLAM
- Kalman Filter
- Model Predictive Control
- PID Control
- Path Planning Algorithms
- Multi Robot Coordination
- Coverage Path Planning
- PX4
- ArduPilot
- MAVROS
- Sim to Real Transfer
AI
- Deep Learning
- Reinforcement Learning
- Transfer Learning
- Behavioral Cloning
- GPT
- BERT
- LLaMA
- Retrieval Augmented Generation
- LLM Fine Tuning
Simulation Tools
- Gazebo
- Isaac Sim
- AirSim
- PyBullet
- Unreal Engine
Hardware Platforms
- NVIDIA Jetson
- Intel RealSense
- LiDAR
- Raspberry Pi
- Arduino
- Pixhawk
- Crazyflie
- Parrot Anafi
Tools and DevOps
- Docker
- Git
- CI CD
- Linux
- VS Code
- Jupyter
- Colab
- MLflow
Soft Skills
- Problem Solving
- Team Collaboration
- Mentoring
- Time Management
- Communication
- Curiosity
- Continuous Learning
Masters' Thesis
Algorithms and Physical Experiments for Vision-based Tracking and Operations of Unmanned Aerial Vehicles

Autonomous UAV Tracking
Developed an integrated tracking system for a chaser UAV to autonomously follow a moving aerial target using a hybrid approach that combines YOLOv11 for detection, KCF for temporal tracking, and a Kalman filter for velocity-aided state prediction. A PPO-based reinforcement learning controller was trained in simulation and deployed on a Crazyflie drone, demonstrating robust performance in both AirSim and real-world flight tests.
“A real-time vision-based UAV tracking system with physics-informed RL policies and successful sim-to-real deployment.”
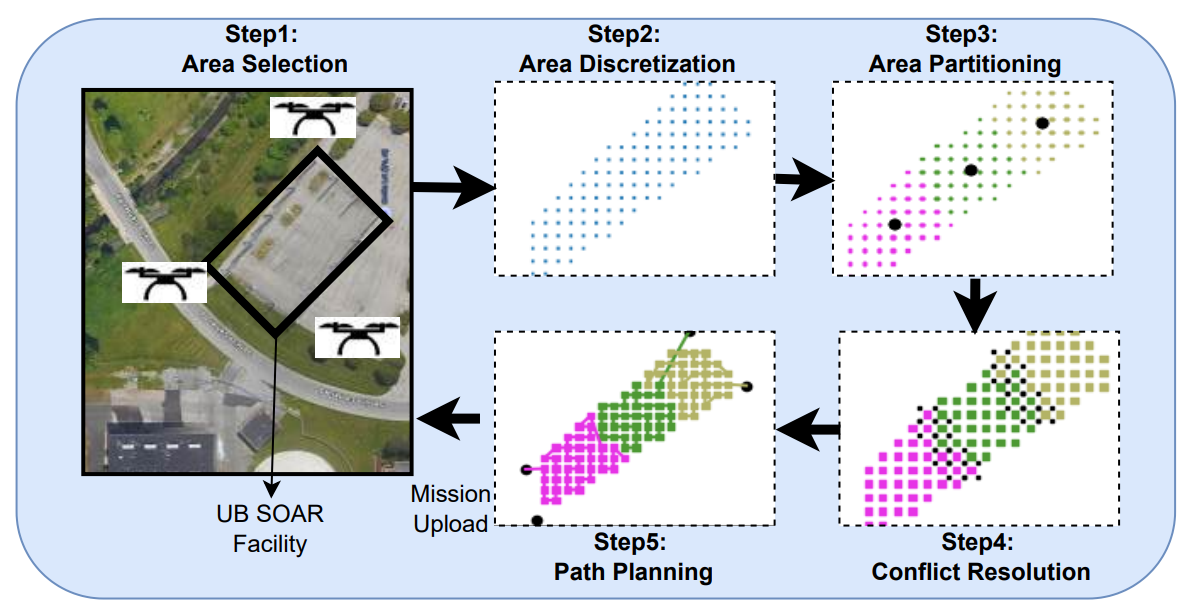
Scalable and Load-Balanced Coverage Path Planning (SCoPP)
SCoPP is a scalable framework for coordinating multiple UAVs to cover large environments efficiently. It combines global Voronoi decomposition with local adaptive routing to ensure both spatial coverage and load balancing across drones. The algorithm was tested in simulation and deployed at the SOAR field site using Crazyflie and Parrot Anafi drones.
“An efficient multi-agent coverage strategy combining geometric partitioning with decentralized planning for scalable UAV missions.”
Professional Certifications
Continuous learning and professional development in robotics, AI, and autonomous systems
Let's collaborate
on Robotics & AI!
I specialize in building intelligent and efficient systems at the intersection of Robotics and Artificial Intelligence. Whether you're looking for a dedicated full-time engineer or want to team up on cutting-edge projects, I'm ready to connect.
I'm actively seeking full-time opportunities in Robotics and AI, and I’m also open to collaborative projects, consulting, and research partnerships. Let's innovate together, reach out anytime.