Wi-Fi-based indoor localization has now matured for over a decade. Most of the current localization algorithms rely on the Wi-Fi access points (APs) in the enterprise network to localize the Wi-Fi user accurately. Thus, the Wi-Fi user’s location information could be easily snooped by an attacker listening through a compromised Wi-Fi AP. With indoor localization and navigation being the next step towards automation, it is important to give users the capability to defend against such attacks. In this paper, we present MIRAGE, a system that can utilize the downlink physical layer information to create a defense against an attacker snooping on a Wi-Fi user’s location information. MIRAGE achieves this by utilizing the beamforming capability of the transmitter that is already part of the Wi-Fi standard protocols. With this initial idea, we have demonstrated that the user can obfuscate his/her location from the Wi-Fi AP always with no compromise to the throughput of the existing Wi-Fi communication system through the real-world prototype, and reduce the user location accuracy of the attacker from 2.3m to more than 10m through simulation.
@inproceedings{ayyalasomayajula2023users,title={Users are Closer than they Appear: Protecting User Location from WiFi APs},author={Ayyalasomayajula, Roshan and Arun, Aditya and Sun, Wei and Bharadia, Dinesh},booktitle={Proceedings of the 24th International Workshop on Mobile Computing Systems and Applications},pages={124--130},year={2023},url={https://dl.acm.org/doi/pdf/10.1145/3572864.3580345},}
A recent spur of interest in indoor robotics has increased the importance of robust simultaneous localization and mapping algorithms in indoor scenarios. This robustness is typically provided by the use of multiple sensors which can correct each others’ deficiencies. In this vein, exteroceptive sensors, like cameras and LiDAR’s, employed for fusion are capable of correcting the drifts accumulated by wheel odometry or inertial measurement units (IMU’s). However, these exteroceptive sensors are deficient in highly structured environments and dynamic lighting conditions. This letter will present WiFi as a robust and straightforward sensing modality capable of circumventing these issues. Specifically, we make three contributions. First, we will understand the necessary features to be extracted from WiFi signals. Second, we characterize the quality of these measurements. Third, we integrate these features with odometry into a state-of-art GraphSLAM backend. We present our results in a 25×30 m and 50×40 environment and robustly test the system by driving the robot a cumulative distance of over 1225 m in these two environments. We show an improvement of at least 6× compared odometry-only estimation and perform on par with one of the state-of-the-art Visual-based SLAM.
@article{arun2022p2slam,title={P2slam: Bearing based wifi slam for indoor robots},author={Arun, Aditya and Ayyalasomayajula, Roshan and Hunter, William and Bharadia, Dinesh},journal={IEEE Robotics and Automation Letters},volume={7},number={2},pages={3326--3333},year={2022},publisher={IEEE},url={https://ieeexplore.ieee.org/abstract/document/9691786},}
@inproceedings{arun2022real,title={Real-time low-latency tracking for UWB tags},author={Arun, Aditya and Chang, Tyler and Yu, Yizheng and Ayyalasomayajula, Roshan and Bharadia, Dinesh},booktitle={Proceedings of the 20th Annual International Conference on Mobile Systems, Applications and Services},pages={611--612},year={2022},}
ViWiD: Leveraging WiFi for Robust and Resource-Efficient SLAM
Recent interest towards autonomous navigation and exploration robots for indoor applications has spurred research into indoor Simultaneous Localization and Mapping (SLAM) robot systems. While most of these SLAM systems use Visual and LiDAR sensors in tandem with an odometry sensor, these odometry sensors drift over time. To combat this drift, Visual SLAM systems deploy compute and memory intensive search algorithms to detect ‘Loop Closures’, which make the trajectory estimate globally consistent. To circumvent these resource (compute and memory) intensive algorithms, we present ViWiD, which integrates WiFi and Visual sensors in a dual-layered system. This dual-layered approach separates the tasks of local and global trajectory estimation making ViWiD resource efficient while achieving on-par or better performance to state-of-the-art Visual SLAM. We demonstrate ViWiD’s performance on four datasets, covering over 1500 m of traversed path and show 4.3x and 4x reduction in compute and memory consumption respectively compared to state-of-the-art Visual and Lidar SLAM systems with on par SLAM performance.
@article{arun2022viwid,title={ViWiD: Leveraging WiFi for Robust and Resource-Efficient SLAM},author={Arun, Aditya and Hunter, William and Ayyalasomayajula, Roshan and Bharadia, Dinesh},journal={arXiv preprint arXiv:2209.08091},year={2022},url={https://arxiv.org/pdf/2209.08091},}
A myriad of IoT applications demand centimeter-accurate localization that is robust to blockages from hands, furniture, or other occlusions in the environment. To address these needs, we developed ULoc, a scalable, low-power, and cm-accurate UWB localization and tracking system. ULoc’s builds a multi-antenna UWB anchor and develops a novel 3D tracking algorithm to deliver a stationary localization accuracy of less than 5 cm and a tracking accuracy of 10 cm in mobile conditions. Follow the demo links below to see ULoc in action. Furthermore, we have also open sourced our hardware design files and source code.
@article{zhao2021uloc,title={Uloc: Low-power, scalable and cm-accurate uwb-tag localization and tracking for indoor applications},author={Zhao, Minghui and Chang, Tyler and Arun, Aditya and Ayyalasomayajula, Roshan and Zhang, Chi and Bharadia, Dinesh},journal={Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies},volume={5},number={3},pages={1--31},year={2021},publisher={ACM New York, NY, USA},url={https://dl.acm.org/doi/pdf/10.1145/3478124},}
Sound source localization based on multi-task learning and image translation network
Yifan Wu, Roshan Ayyalasomayajula, Michael J Bianco, Dinesh Bharadia, and Peter Gerstoft
The Journal of the Acoustical Society of America, Jun 2021
@article{wu2021sound,title={Sound source localization based on multi-task learning and image translation network},author={Wu, Yifan and Ayyalasomayajula, Roshan and Bianco, Michael J and Bharadia, Dinesh and Gerstoft, Peter},journal={The Journal of the Acoustical Society of America},volume={150},number={5},pages={3374--3386},year={2021},publisher={AIP Publishing},}
Sslide: Sound source localization for indoors based on deep learning
Yifan Wu, Roshan Ayyalasomayajula, Michael J Bianco, Dinesh Bharadia, and Peter Gerstoft
In ICASSP 2021-2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Jun 2021
@inproceedings{wu2021sslide,title={Sslide: Sound source localization for indoors based on deep learning},author={Wu, Yifan and Ayyalasomayajula, Roshan and Bianco, Michael J and Bharadia, Dinesh and Gerstoft, Peter},booktitle={ICASSP 2021-2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP)},pages={4680--4684},year={2021},organization={IEEE},url={https://doi.org/10.1109/ICASSP39728.2021.9415109},}
Location determination of wireless communications devices
Location services, fundamentally, rely on two components- a mapping system and a positioning system. The mapping system provides the physical map of the space, and the positioning system identifies the position within the map. Outdoor location services have thrived over the last couple of decades because of well-establishedplatforms for both these components (e.g. Google Maps for mapping, and GPS for positioning). In contrast, indoor location services haven’t caught up because of the lack of reliable mapping and positioning frameworks, as GPS is known not to work indoors. WiFi positioning lacks maps and is also prone to environmental errors. In this paper, we present DLoc, a Deep Learning based wireless localization algorithm that can overcome traditional limitations of RF-based localization approaches (like multipath, occlusions, etc.). DLoc uses data from the mapping platform we developed, MapFind, that can construct location-tagged maps of the environment. Together, they allow off-the-shelf WiFi devices like smartphones toaccess a map of the environment and to estimate their position withrespect to that map. During our evaluation, MapFind has collected location estimates of over 120 thousand points under 10 different scenarios across two different spaces covering 2000 sq. Ft. DLoc outperforms state-of-the-art methods in WiFi-based localizationby 80% (median and 90th percentile) across the 2000 sq. ft. spanningtwo different spaces.
@inproceedings{ayyalasomayajula2020deep,title={Deep learning based wireless localization for indoor navigation},author={Ayyalasomayajula, Roshan and Arun, Aditya and Wu, Chenfeng and Sharma, Sanatan and Sethi, Abhishek Rajkumar and Vasisht, Deepak and Bharadia, Dinesh},booktitle={Proceedings of the 26th Annual International Conference on Mobile Computing and Networking},pages={1--14},year={2020},url={https://dl.acm.org/doi/pdf/10.1145/3372224.3380894},}
LocAP: Autonomous millimeter accurate mapping of WiFi infrastructure
Indoor localization has been studied for nearly two decades fueled by wide interest in indoor navigation, achieving the necessary decimeter-level accuracy. However, there are no real-world deployments of WiFi-based user localization algorithms, primarily because these algorithms are triangulation based and therefore assume the location of the Access Points, their antenna geometries, and deployment orientations in the physical map. In the real world, such detailed knowledge of the location attributes of the Access Point is seldom available, thereby making WiFi localization hard to deploy. In this paper, for the first time, we establish the accuracy requirements for the location attributes of access points to achieve decimeter level user localization accuracy. Surprisingly, these requirements for antenna geometries and deployment orientation are very stringent, requiring millimeter level and sub-10 degree of accuracy respectively, which is hard to achieve with manual effort. To ease the deployment of real-world WiFi localization, we present LocAP, which is an autonomous system to physically map the environment and accurately locate the attributes of existing infrastructure AP in the physical space down to the required stringent accuracy of 3 mm antenna separation and 3degree deployment orientation median errors, whereas state-of-the-art report 150 mm and 25degrees respectively.
@inproceedings{ayyalasomayajula2020locap,title={LocAP: Autonomous millimeter accurate mapping of WiFi infrastructure},author={Ayyalasomayajula, Roshan and Arun, Aditya and Wu, Chenfeng and Rajagopalan, Shrivatsan and Ganesaraman, Shreya and Seetharaman, Aravind and Jain, Ish Kumar and Bharadia, Dinesh},booktitle={17th USENIX Symposium on Networked Systems Design and Implementation (NSDI 20)},pages={1115--1129},year={2020},url={https://www.usenix.org/conference/nsdi20/presentation/ayyalasomayajula},}
2018
BLoc: CSI-based accurate localization for BLE tags
Bluetooth Low Energy (BLE) tags have become very prevalent over the last decade for tracking applications in homes as well as businesses. These tags are used to track objects, navigate people, and deliver contextual advertisements. However, in spite of the wide interest in tracking BLE tags, the primary methods of tracking them are based on signal strength (RSSI) measurements. Past work has shown that such methods are inaccurate, and prone to multipath and dynamic environments. As a result, localization using Wi-Fi has moved to Channel State Information (CSI, includes both signal strength and signal phase) based localization methods. In this paper, we seek to investigate what are the challenges that prevent BLE from adopting CSI based localization methods. We identify fundamental differences at the PHY layer between BLE and Wi-Fi, that make it challenging to extend CSI based localization to BLE. We present our system, BLoc, that incorporates novel, BLE-compatible algorithms to overcome these challenges and enable an accurate, multipath-resistant localization system. Our empirical evaluation shows that BLoc can achieve a localization accuracy of 86 cm with BLE tags, a 3X improvement over a state-of-the-art baseline.
@inproceedings{ayyalasomayajula2018bloc,title={BLoc: CSI-based accurate localization for BLE tags},author={Ayyalasomayajula, Roshan and Vasisht, Deepak and Bharadia, Dinesh},booktitle={Proceedings of the 14th International Conference on emerging Networking EXperiments and Technologies},pages={126--138},year={2018},url={https://dl.acm.org/doi/pdf/10.1145/3281411.3281428},}
2017
Differentiating photographic and PRCG images using tampering localization features
Roshan Ayyalasomayajula, and Vinod Pankajakshan
In Proceedings of International Conference on Computer Vision and Image Processing: CVIP 2016, Volume 2, Oct 2017
@inproceedings{ayyalasomayajula2017differentiating,title={Differentiating photographic and PRCG images using tampering localization features},author={Ayyalasomayajula, Roshan and Pankajakshan, Vinod},booktitle={Proceedings of International Conference on Computer Vision and Image Processing: CVIP 2016, Volume 2},pages={429--438},year={2017},organization={Springer Singapore}}

 Real-time low-latency tracking for UWB tagsIn Proceedings of the 20th Annual International Conference on Mobile Systems, Applications and Services, 2022
Real-time low-latency tracking for UWB tagsIn Proceedings of the 20th Annual International Conference on Mobile Systems, Applications and Services, 2022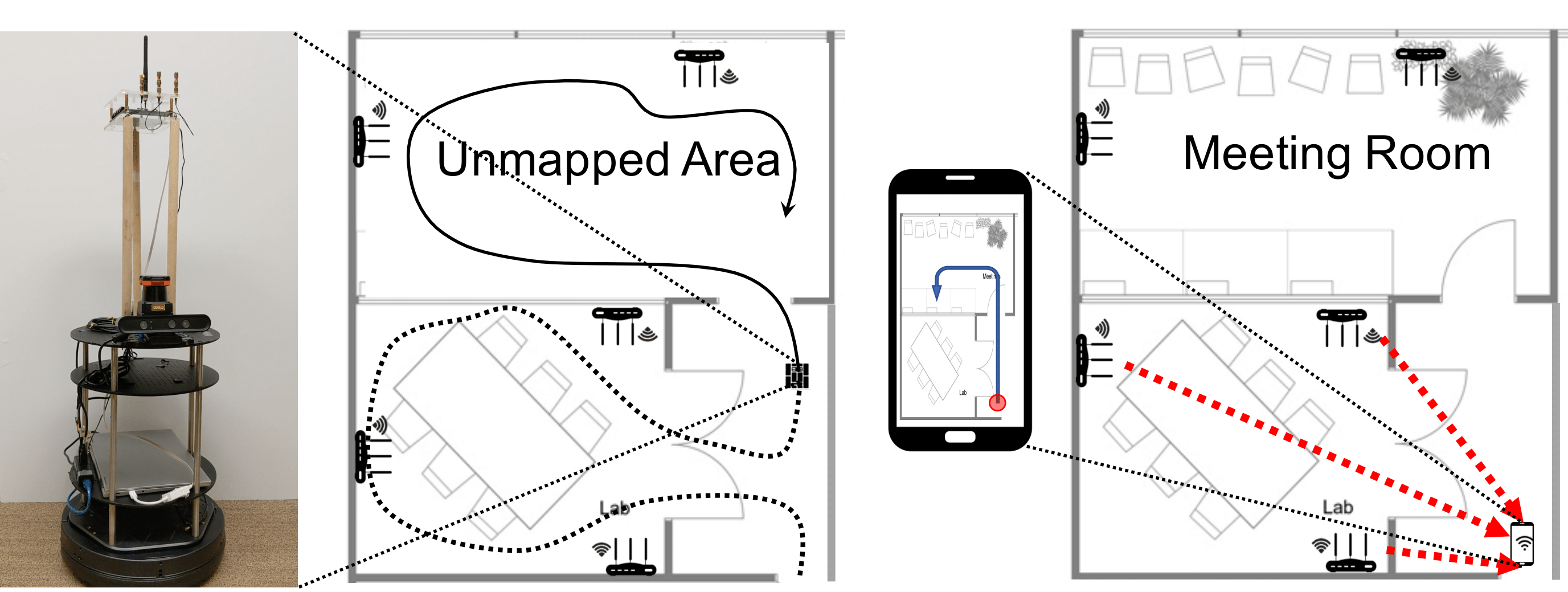 Wireless device localizationJun 2022US Patent App. 17/604,380
Wireless device localizationJun 2022US Patent App. 17/604,380



 Location determination of wireless communications devicesOct 2021US Patent 11,140,651
Location determination of wireless communications devicesOct 2021US Patent 11,140,651
