John L. Crassidis
Professor
University at Buffalo
Dept of Mech & Aero Eng
Amherst, NY 14260
Phone: (716) 645-1426
Fax: (716) 645-3668
Spacecraft Formation Flying Navigation
Research is being performed for vision-based attitude and position determination for formation
flying applications using a newly-developed sensor by
Dr. John L. Junkins employing
Position Sensing Diodes to determine line-of-sight vectors to optical
beacons.
The vision-based navigation (VISNAV) system comprises of an
optical sensor of a new kind combined with specific light sources (beacons) in order
to achieve a selective or "intelligent" vision. The sensor is made up of a Position
Sensing Diode (PSD) placed in the focal plane of a wide angle lens. When the rectangular
silicon area of the PSD is illuminated by energy from a beacon focused by the lens,
it generates electrical currents in four directions that can be processed with appropriate
electronic equipment. While the individual currents depend on the intensity of the light,
their imbalances are weakly dependent on the intensity and are almost linearly proportional
to the location of the centroid of the light beam in the PSD.
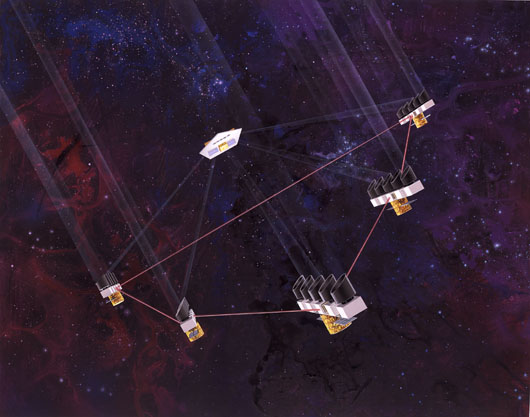
Spacecraft formation flying is an evolving technology with many possible applications, such
as long baseline interferometry, stereographic imaging, synthetic apertures, and
distinguishing spatial from temporal magnetospheric variations. A significant advantage
of distributed spacecraft platforms over a single multifunctional spacecraft is that
single point failures can be rectified through replacement of cheaper and smaller
spacecraft to maintain mission capability, thus providing a more reliable and robust
system. Many missions (in particular interferometry missions) rely on precise relative
position and attitude knowledge in order to maintain mission requirements. To date,
most research studies into determining relative positions and attitudes between vehicles
have involved using the Global Positioning System (GPS), which restricts the spacecraft
formation to near-Earth applications. An application of GPS-like technology to a deep
space mission has been proposed, but this requires extensive hardware development
and is subject to the generic GPS performance-limiting effects, including multipath,
geometric dilution of precision, integer ambiguity resolution, and cycle slip.
The main objective of the proposed research is to provide a novel, reliable, and
autonomous relative navigation and attitude determination system, employing relatively
simple electronic circuits with modest digital signal processing (DSP) requirements,
and being fully independent of any external systems.
Alonso, R., Du, J.-Y., Hughes, D., Junkins, J.L., and Crassidis, J.L., “Relative Navigation for Formation Flying of Spacecraft,” Proceedings of the Flight Mechanics Symposium, NASA-Goddard Space Flight Center, Greenbelt, MD, June 2001, pp. 115-129.